Teaching robots to ask for help is key to making them safer and more efficient.
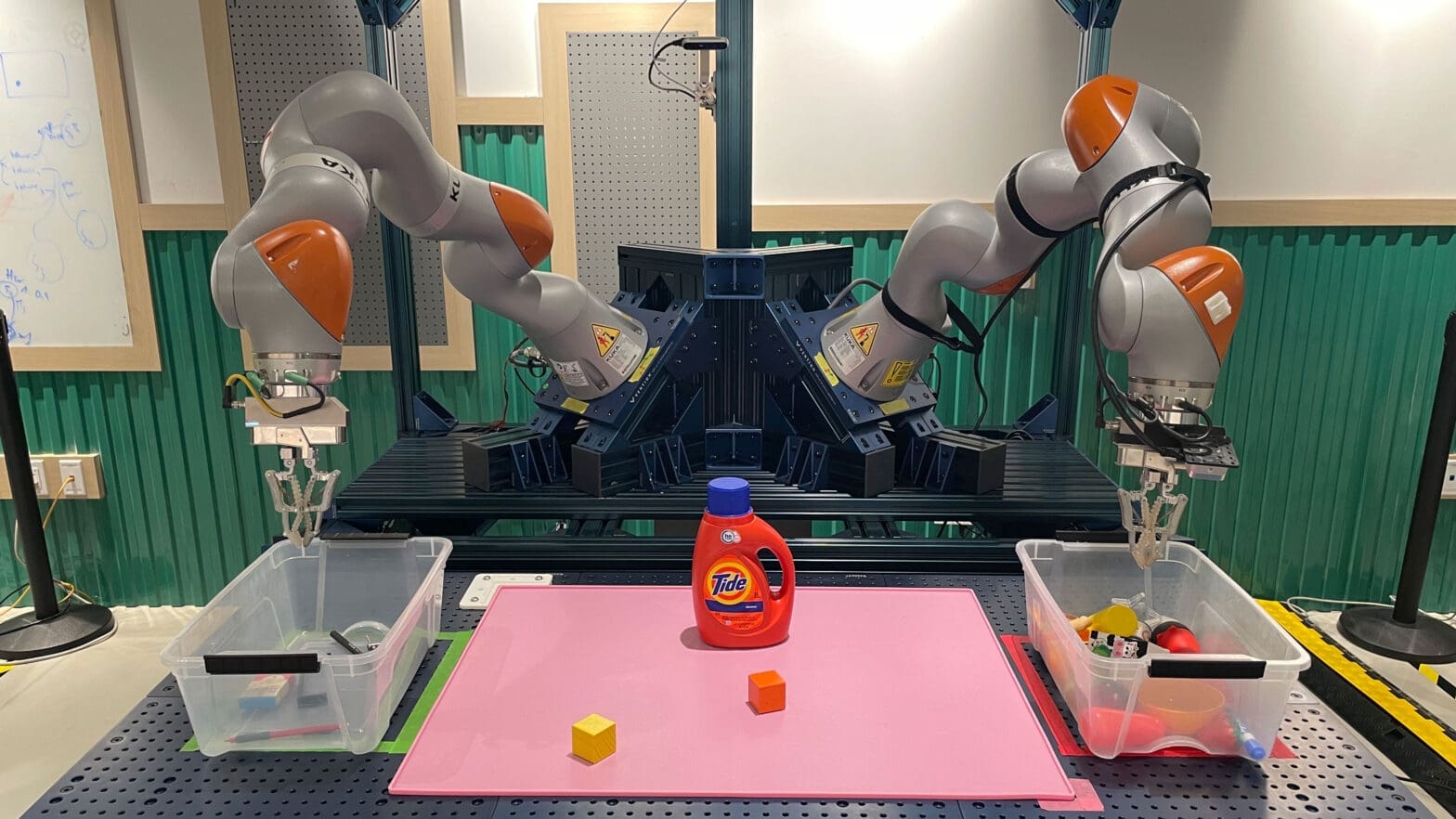
Engineers at Princeton University and Google have come up with a new way to teach robots to know when they don’t know. The technique involves quantifying the fuzziness of human language and using that measurement to tell robots when to ask for further directions. Telling a robot to pick up a bowl from a table with only one bowl is fairly clear. But telling a robot to pick up a bowl when there are five bowls on the table generates a much higher degree of uncertainty — and triggers the robot to ask for clarification.
Because tasks are typically more complex than a simple “pick up a bowl” command, the engineers use large language models (LLMs) — the technology behind tools such as ChatGPT — to gauge uncertainty in complex environments. LLMs are bringing robots powerful capabilities to follow human language, but LLM outputs are still frequently unreliable, said Anirudha Majumdar, an assistant professor of mechanical and aerospace engineering at Princeton and the senior author of a study outlining the new method.
“Blindly following plans generated by an LLM could cause robots to act in an unsafe or untrustworthy manner, and so we need our LLM-based robots to know when they don’t know,” said Majumdar.
The system also allows a robot’s user to set a target degree of success, which is tied to a particular uncertainty threshold that will lead a robot to ask for help. For example, a user would set a surgical robot to have a much lower error tolerance than a robot that’s cleaning up a living room.
“We want the robot to ask for enough help such that we reach the level of success that the user wants. But meanwhile, we want to minimize the overall amount of help that the robot needs,” said Allen Ren, a graduate student in mechanical and aerospace engineering at Princeton and the study’s lead author.
This article was adapted from a previously published story.