With their ability to shapeshift and manipulate delicate objects, soft robots could work as medical implants, deliver drugs inside the body and help explore dangerous environments. But the squishy machines are often limited by rigid mechanical parts or external systems that provide power or help them move.
Now, engineers at Princeton have designed and built soft-rigid hybrid robots that move and shift without the need for motors or external pneumatic controls. To do this, the team combined a printable polymer, called a liquid crystal elastomer, with flexible electronics and folding techniques based on the art of origami.
In an article published March 21 in the journal Advanced Functional Materials, a research team led by professors Emily Davidson and Glaucio Paulino reported that they used a 3D printer to create a reconfigurable soft robot that was able to repeatedly move without noticeable degradation.
As a demonstration, the researchers built a soft robot in the shape of a crane, a classic origami figure, that flaps its wings when powered with electricity. The crane moves without a motor. Instead, the robot’s motion relies on targeted heating in the polymer to control the wing flapping. The experiment also demonstrated that the Princeton soft robot can precisely and repeatedly move and return to its original shape without wear or distortion with real-time programmable sequences, a key feature for future applications.
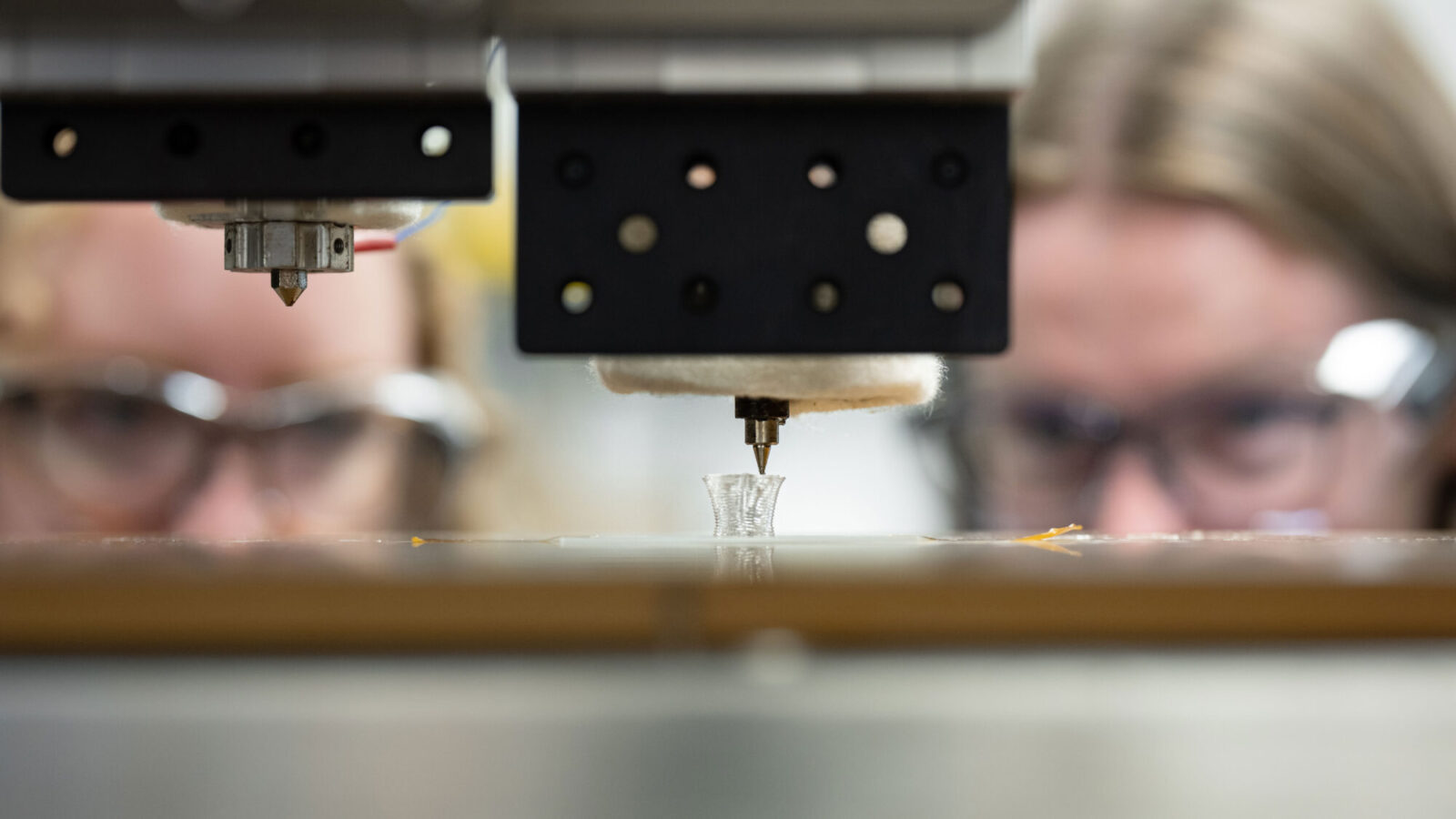
Construction begins with a 3D printer and a special polymer
The system starts with a molten polymer printed into patterned zones using Davidson’s customized 3D printer. Despite its flexible nature, the polymer the researchers use is a liquid crystal elastomer, which means its internal molecules have an ordered structure. Davidson’s group are experts in controlling the structure of liquid crystal elastomers through molecular design, and controlling the nanostructure (in this case, the orientation) of polymers through printing, both of which were crucial to this project. The researchers programmed the printer to vary the internal orientation of the molecular structure of the polymer as it prints. Each of the patterned zones in the printed material features consistent molecular alignment. By stacking these zones and joining them in different ways, the researchers were able to create hinges in the material that bend in pre-programmed ways when the material is heated.

As part of the printing, the researchers also added flexible electronics into the hinges in the material. The printed circuit boards’ flexible structure allowed the researchers to embed them directly in the printing material rather than apply the circuits in a separate step. This simplifies fabrication and allows for greater consistency and functional integration of the circuit into the robot.
Davidson noted that a critical advance in the current work was the integration of 3D printed liquid crystal elastomers with printed circuit boards that could be commercially manufactured. The ability to co-design the liquid crystal elastomer hinges and the flexible printed circuit boards to drive actuation made the fabrication and control of these soft-rigid robots feasible.
Printed circuit boards control the heating that drives motion
Once embedded, these circuit boards allow the researchers to heat extremely specific areas of the polymer structure and perform closed-loop control using embedded temperature sensors. This heating takes advantage of the carefully structured polymer, causing the material to contract in ways that the engineers program into the polymer printing. These contractions trigger folding along hinges. To ensure the material folds only at the hinges, the researchers added light fiberglass panels to the flexible printed circuit boards in between the polymer hinges.
The researchers used mathematics derived from origami patterns to control the robots’ motion based on systems of folding and unfolding. Paulino’s research team has pioneered the use of origami to design medical implants, construction components and robotics. Recent projects include segmented soft robots that use origami systems to navigate complex paths, robots that can transform their shapes and adaptively reconfigure in a magnetic field, and programmable systems that can encrypt information and function as mechanical computers.
Paulino said an important feature of the design is that the software used to control the robot uses embedded temperature sensors in the origami to compensate for small errors that creep into the system as the robot repeatedly changes shape. Paulino said that the ability to correct these errors is key to soft robots’ durability.
The work began as an undergraduate thesis project
The development of the new robotic system began as David Bershadsky’s undergraduate thesis project at Princeton. Bershadsky, now in graduate school at the University of Texas-Austin, received his degree in electrical engineering in 2024 from Princeton.
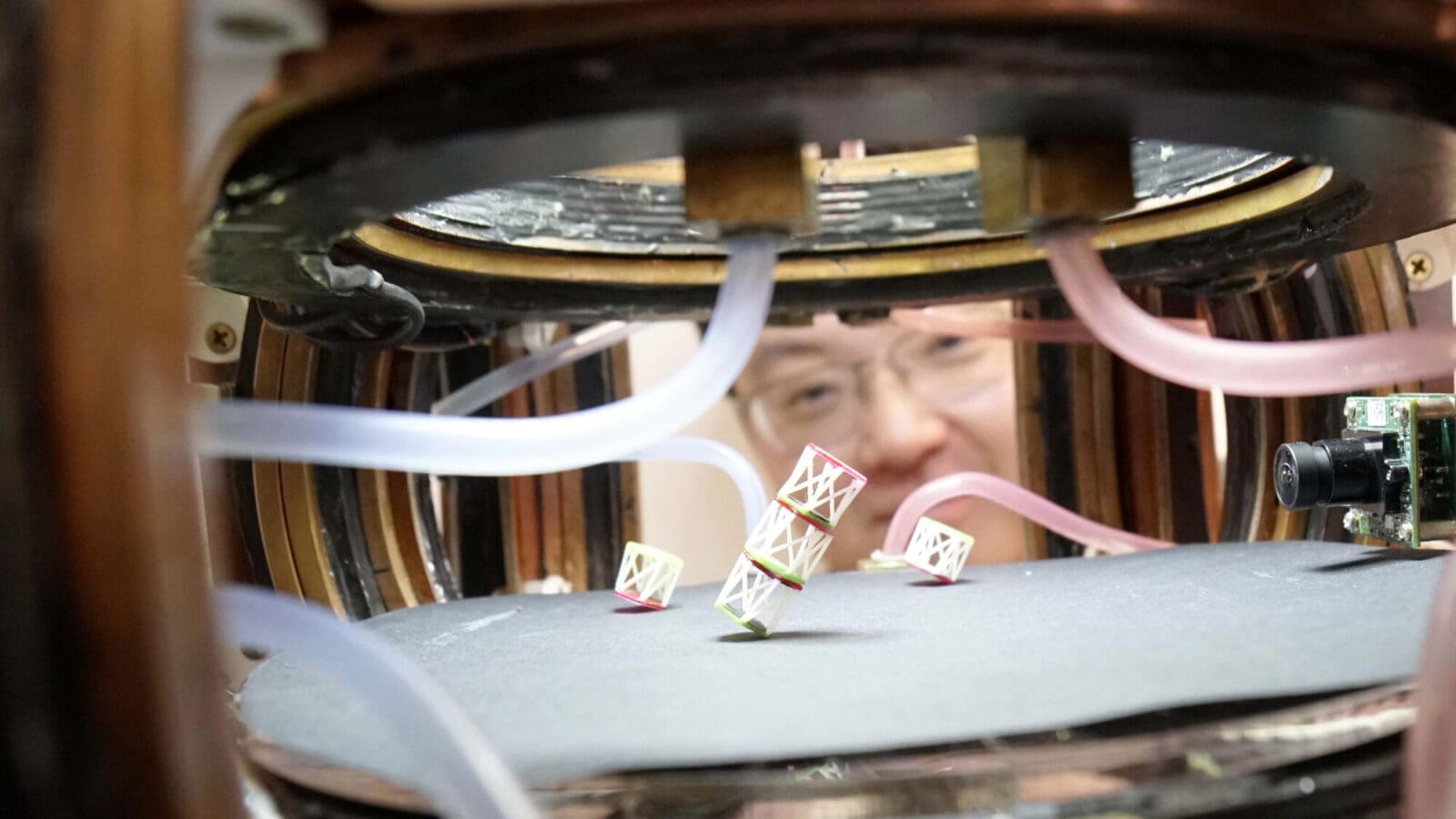
Bershadsky said he has been interested in robotics since he pursued a project in high school developing swarm robotics that deployed individual robotic units that changed size. When he arrived at Princeton, he was interested in advancing the work.
“I was looking for a way to easily and repeatedly create unit cells that could transform based on volume,” he said.
Bershadsky thought that liquid crystal elastomers could serve as a vehicle to create that type of robotic system and approached Professor Davidson, an expert in the material, for advice. Davidson thought it was an intriguing idea.
“She said, ‘You should probably take Paulino’s origami engineering class to get a more formal background,’” Bershadsky said. One of the TAs in the class was Tuo Zhao, a postdoctoral researcher in Paulino’s lab who helped develop the research and is one of paper’s co-authors.
Researchers designed technology for manufacture
Bershadsky said the work is primarily an “integration of material science with robotics with a focus on manufacturability.”
“I think the big contribution is we showed integration of a complex system where we have local heating control,” he said. “We can control activation depending on where we heat.”
Besides demonstrating the viability of the robotic system, Bershadsky created a software tool that designers can use to create their own robots. The tool is available on the lab’s github and included with the paper’s dataset.
The most challenging part of the work?
“Honestly, people talk about system integration being the hard part,” Bershadsky said. “This entire project was the integration of a bunch of different technologies.”
The article, “Digital Actuation Control of Soft Robotic Origami With Self-Folding Liquid Crystal Elastomer Hinges,” was published online March 21 in the journal Advanced Functional Materials. Authors were Bershadsky, Davidson, Paulino and Zhao. Support for the project was provided in part by Princeton’s Kamran Rafieyan ’89 Fund for Undergraduate Research, Princeton University Project X Innovation funds, Princeton Catalysis Initiative funds, Princeton University School of Engineering and Applied Science Senior Thesis Funding, and the National Science Foundation.