The model could be applied to create future microrobots that efficiently spread through complex 3D environments, such as tiny synthetic cargo carriers that navigate tumor tissue to deliver a chemotherapy drug.
“We wanted to understand how the details of this [hop-and-trap] mechanism impact how fast [bacteria] spread and how far they can move within that environment,” said Christina Kurzthaler, a postdoctoral research associate in mechanical and aerospace engineering.
Kurzthaler is the first author of the new study, published Dec. 6 in the journal Nature Communications.
The research draws its inspiration from recent experimental work by co-authors Sujit Datta, assistant professor of chemical and biological engineering and Tapomoy Bhattacharjee, a former postdoctoral research associate at the Andlinger Center for Energy and the Environment who worked in Datta’s lab. They first described the hop-and-trap strategy E. coli bacteria use to navigate porous environments.
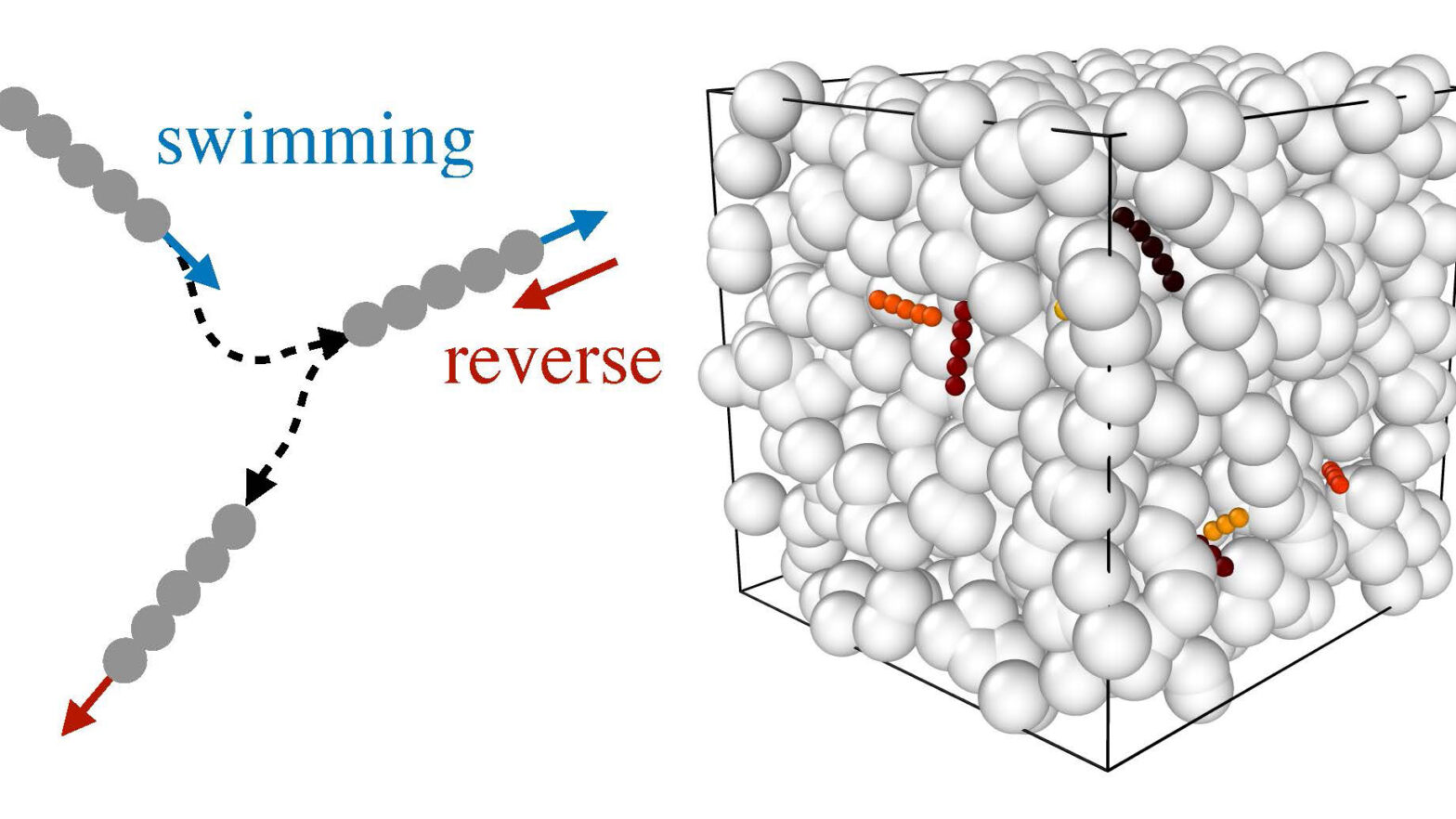
Kurzthaler worked with co-first author Suvendu Mandal, a researcher at the Technische Universität Darmstadt, to simulate how a bacterium might randomly move through a complex, 3D environment — picture a caterpillar swimming through an aquarium full of ping pong balls, but on a molecular scale. They used a Brownian dynamics simulation developed by polymer physicists that takes into account the random motion of particles in a liquid and uses a self- propelled polymer to stand in for the bacterium.
Using statistical analyses, the researchers identified patterns in the trajectories made by the polymers in the simulations. Some polymers swam paths very similar to the hopping-and- trapping of E. coli.
The researchers also developed a simplified model of the hopping and trapping, which could be used to determine the most efficient way for bacteria to spread. They discovered a general rule: a bacterium moves most effectively when it travels a run length close to the same length as the longest pores in the environment before reorienting. Changing directions too often or not often enough just slows it down. Details of the porous medium, such as the concavity of the surfaces, appear to matter less.
“When the run length is very small, the bacteria don’t move very far, because they just randomly move forward and backward and keep fumbling all the time,” Kurzthaler said. “When this length is very long, we found that the cells become trapped in their environment because they never reorient.”
These findings explain a somewhat counterintuitive observation made in the late 1980s. Bacteria swimming through a wide-open liquid twirl their whip-like flagella to swim forward, then flail the flagella to tumble and rotate to a new direction, which is analogous to the
hopping-and-trapping that occurs in porous environments. This run-and-tumble strategy results in an incredibly erratic path with no clear direction. In 1989, microbiologist Howard Berg and his colleagues reported that bacterial colonies moved across a porous agar plate fastest, not when they were constantly swimming, but when they did a moderate amount of tumbling.
“It was a puzzle why certain rotation rates of the bacteria led to certain spreading… for about 30 years,” said senior author Howard Stone, the Donald R. Dixon ’69 and Elizabeth W. Dixon Professor of mechanical and aerospace engineering. “This use of modeling with modern experiments has shed new light on an old problem and ties it to the geometry of the porous media.”
The new model also provides a criterion for developing polymers capable of carrying pharmaceuticals through the body or finding and degrading pollutants in soil. “If you wanted to design a microrobot,” Kurzthaler said, “it would really be important for it to reorient in order to explore the complex surroundings in which they are expected to operate.”
“The authors adopted an original approach using a model based on polymer physics to mimic motile bacteria cells,” said Giorgio Volpe, an associate professor of physical chemistry at University College London who specializes in soft active matter physics and was not involved in the study. “Thanks to this novel approach, they were able to mimic bacterial motility in porous media and to determine optimal rules for their spreading in such complex environments.”
Volpe thinks it would be fascinating to move from looking at the individual bacterium to the collective behaviors of the group, which may reveal how they form and propagate biofilms in porous materials. This work could be especially relevant for understanding and perhaps preventing biofilm formation in critical places, like water filters in hospitals. “How these bacteria stick around and move through the porous material and eventually end up forming biofilms can obviously have a huge impact on the transmission of antibiotic resistance,” he said.
Hartmut Löwen, a professor of theoretical physics at Heinrich-Heine-Universität Düsseldorf, is a co-author on the study. The research received funding from the U.S. National Science Foundation, the Austrian Science Fund, the Deutsche Forschungsgemeinschaft, the Project X Innovation Fund, the Eric and Wendy Schmidt Transformative Technology Fund, the Andlinger Center for Energy and the Environment at Princeton University and the Princeton Center for Complex Materials.